
Page 55 - Landinfo_ 1_2022_Klimawandel
P. 55
Gartenbau und Sonderkulturen
Bild 3: Kontrolle am Mikroskop;
Quelle: LVG Heidelberg
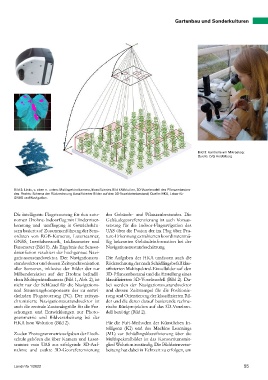
Bild 2: Links, v. oben n. unten: Multispektralkamera, klassifiziertes Bild ©Wolution, 3D-Voxelmodell des Pflanzenbestan-
des. Rechts: Schema der Rückrechnung klassifizierter Bilder auf den 3D-Voxeldatenbestand; Quelle: HKA, Labor für
GNSS und Navigation.
Die intelligente Flugsteuerung für den auto- des Gebäude- und Pflanzenbestandes. Die
nomen Drohne-Indoorflug mit Hinderniser- Gebäudegeoreferenzierung ist auch Voraus-
kennung und -umfliegung in Gewächshäu- setzung für die Indoor-Flugnavigation des
sern basiert auf Zusammenführung der Sens- UAS über die Fusion der im Flug über Fea-
ordaten von RGB-Kameras, Laserscanner, ture-Erkennung extrahierten koordinatenmä-
GNSS, Inertialsensorik, Inklinometer und ßig bekannten Gebäudeinformation bei der
Barometer (Bild 1). Als Ergebnis der Sensor- Navigationszustandsschätzung.
datenfusion resultiert der hochgenaue Navi-
gationszustandsvektor. Der Navigationszu- Die Aufgaben der HKA umfassen auch die
standsvektor und dessen Zeitsynchronisation Rückrechnung der nach Schädlingsbefall klas-
aller Sensoren, inklusive der Bilder der zur sifizierten Multispektral-Einzelbilder auf den
Milbendetektion auf der Drohne befindli- 3D-Pflanzenbestand und die Erstellung eines
chen Multispektralkamera (Bild 1, Abb. 2), ist klassifizierten 3D-Voxelmodell (Bild 2). Da-
nicht nur der Schlüssel für die Navigations- bei werden der Navigationszustandsvektor
und Steuerungskomponente der zu entwi- und dessen Zeitstempel für die Positionie-
ckelnden Flugsteuerung (FC). Der zeitsyn- rung und Orientierung der klassifizierten Bil-
chronisierte Navigationszustandsvektor ist der und die deren darauf basierende rechne-
auch die zentrale Zustandsgröße für die For- rische Rückprojektion auf das 3D-Voxelmo-
schungen und Entwicklungen zur Photo- dell benötigt (Bild 2).
grammetrie und Bildverarbeitung bei der
HKA bzw. Wolution (Bild 2). Für die FuE-Methoden der Künstlichen In-
telligenz (KI) und des Machine Learnings
Zu den Photogrammetrieaufgaben der Hoch- (ML) zur Schädlingsklassifizierung über die
schule gehören die über Kamera und Laser- Multispektralbilder ist das Konsortiumsmit-
scanner vom UAS aus erfolgende 3D-Auf- glied Wolution zuständig. Die Bilddatenverar-
nahme und exakte 3D-Georeferenzierung beitung hat dabei in Echtzeit zu erfolgen, um
Landinfo 1/2022 55